

レンズのデータシートには、写真家やエンジニアがレンズの挙動を理解するのに役立つ歪み情報が含まれていることがよくあります。レンズの歪みとは、シーン内の直線が最終的な画像で曲がって見える現象を指します。これは、レンズが視野角範囲のすべての部分からの光を完全に集束できないために起こります。
このブログでは、レンズのデータシートの歪みパラメータと、歪みを表現する 3 つの方法について説明します。
レンズの歪みの種類
写真撮影でよく見られるレンズの歪みには、主に次の3つがあります:
- バレル歪み: 直線が外向きに曲がり、樽の膨らみのようになります。広角レンズでよく見られます。
- 糸巻き歪み: 直線が内向きに曲がり、糸巻きのようになります。望遠レンズでよく見られます。
- ヒゲ歪み(波形歪み): これはあまり一般的ではない歪みで、直線が波状に見える現象です。ヒゲのように見えることからこの名前がついています。
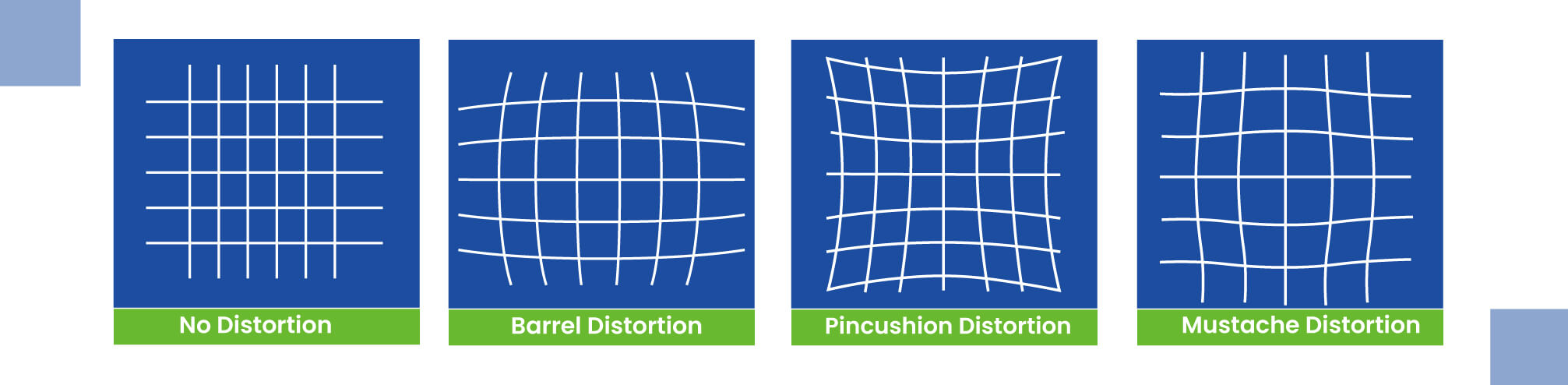
これらの歪みを理解し、区別するために次のように可視化して考えてみましょう:
四角いグリッドがあるシーンを想像してください。バレル歪みでは、グリッドが外向きに膨らみ、辺の部分の四角形が広く見えます。一方、糸巻き歪みでは、グリッドが内向きに沈み、辺の部分の四角形が狭く見えます。ヒゲ歪みでは、グリッドの線が波状になります。
歪みの数学的表現の3つの方法
数学的に、歪みはレンズのデータシートで3つの異なる方法で表現できます。それぞれについて詳しく見ていきましょう。
1. 光学的歪み / 直線的歪み / F-Tan(θ)
光学的歪みは、光学系の全体的な歪みのパラメータを表します。F-Tan θ または光学的歪みは、次の式を使って計算できます。
F-Tan(θ)歪み = (実際の画像の高さ – 基準画像の高さ) / 基準画像の高さ * 100
ここで、
基準画像高さ(mm)は、次の式で求められます:=
基準画像高さ(mm) = 焦点距離(mm) × tan(最大視野角(DFOV)の半分の角度)
例:上記の半角法式を使って、バレル歪みを計算してみましょう。
-
- 測定値の収集:
有効焦点距離(F):4.4mm(レンズの光学中心から画像センサーまでの距離)
特定の画像距離での視野角(FOV):異なる画像距離での値(例:124° @ 10mm)
画像の対角線寸法:10mm(画像センサーの対角線サイズ)
- 測定値の収集:
-
- 基準高さを計算:
これは、歪みがなかった場合の理想的な物体の高さを表します。
半対角視野角(FOV): 対角視野角を2で割ります(例:124° / 2 = 62°)
基準の高さ = F × tan(半対角視野角):4.4mm × tan(62°)= 8.27519mm
- 基準高さを計算:
-
- 歪みのパーセンテージを計算:
実際の高さ:画像の対角線寸法の半分(この場合、5mm)
歪み% = ((実際の高さ – 基準の高さ) / 基準の高さ) × 100%
これにより、実際の物体の高さと理想的な高さとの差をパーセンテージで計算します。
- 歪みのパーセンテージを計算:
負の値はバレル歪みを示します(物体が画像の端に向かって小さく見える)。上記の例では、計算結果は大きな画像距離(10mm)で高いバレル歪み(-39.5%)を示しています。画像距離が小さくなる(9mmや5mm)につれて、歪みのパーセンテージは絶対値が小さくなり、バレル効果が減少することを示しています。
F-Tan(θ)法は、歪みを計算するための、より一般的なアプローチです。この方法は、さまざまなレンズ、特に写真撮影用レンズの初期歪み評価によく使用されます。この方法は、歪みによって直線が理想的な位置からどのようにずれるかを理解するのに役立ちます。
F-Tan(θ)計算は、カメラキャリブレーションプロセスで使用され、歪みのパラメータを推定して撮影した画像を補正します。レンズ設計者は、最終的なレンズにおける歪みを予測し、最小限に抑えるために、設計段階でF-Tan(θ)計算を使用することがよくあります。これにより、画像の湾曲を最小限に抑え、正確な画像再現を保証するレンズが作られます。
2. F(θ)
F(θ)法は、理想的な歪みのない画像点と実際の歪んだ画像点の間の角度的関係に焦点を当て、倍率情報を必要としません。
F-Theta歪みをF*theta(ラジアン)で計算する手順は以下の通りです:
- 半分の対角線FOV(θ/2)を度からラジアンに変換します(pi/180を掛けます)。
- 焦点距離(F)にラジアンの角度を掛けて、基準の高さ(理想的な歪みのない画像の高さ)を求めます。
- 実際の画像の高さと参照高さを比較して、歪みのパーセンテージを計算します。
F-Thetaレンズは、スキャンフィールド全体で一定の画像サイズ(またはレーザーのスポットサイズ)を維持するように特別に設計されています。F-Theta計算は、理想からの偏差を測定することで、この一定のサイズの精度を確保するのに役立ちます。これらのレンズは、レーザーマーキングや彫刻、レーザー切断、3Dプリンティング、LiDARなど、さまざまな用途で使用されています。
F-Tan(θ)法は、角度と物体のサイズ、倍率の関係を示すためにタンジェント関数を使用します。一方、F(θ)法は、画像点の角度的な位置に焦点を当てます。両方の方法は、焦点距離(F)と対角FOV(度)を必要としますが、F(θ)法ではFOVを度からラジアンに変換します。
F-Tan(θ)法は、倍率に基づいて参照高さを計算するためにtan(θ)関係を使用し、F(θ)法は角度的な位置に基づいて理想的な画像点の位置を表現するためにF*θ(ラジアン)を使用します。
どちらの方法も歪みを推定するために使用できますが、特定の状況ではどちらかがより適用しやすい場合があります。F-Tan(θ)法は、歪みによる物体のサイズと倍率の変化に焦点を当てる場合に好まれます。一方、F(θ)法は、倍率情報なしで歪んだ画像点の角度的な関係を求めるために使用されます。
3. TV歪み
TV歪みは、その名前が示す通り、テレビに由来しています。次の式を使って計算できます:
TV歪み(バレル歪み) = ((参照画像の高さ – 実際の画像の高さ) / (実際の画像の高さ)) × 100) / 2
上記の式は、半分のFOV(視野)の歪みを計算するものです。
この式は、いくつかの要素に基づいてバレル歪みを計算します:
- 画像センサーの寸法: 画像センサーの半分の対角線サイズと半分の垂直サイズが計算に使用されます。
- 光学歪み値: これらの値は、歪みの度合いを示し、バレル歪みの場合は負のパーセンテージで表されます。この式は、レンズの対角視野(DFOV)および垂直視野(VFOV)の歪み値を別々に使用します。
- 対角視野のコサイン(cos(DFOV)): この数学的な項は、計算に対角視野の角度を組み込みます。
この式は、センサーサイズに基づいて予測される物体の高さと、歪み値および視野に基づいて実際に歪んだ物体の高さとの差を計算します。この差は、垂直センサーサイズの割合として表され、バレル歪みの尺度となります。
図1: テレビ歪み – バレル型
 図2: テレビ歪み – 糸巻き型
図2: テレビ歪み – 糸巻き型
e-con Systemsの組み込みビジョンアプリケーションに適したOEMカメラをご紹介します
e-con Systemsは、20年以上の経験を持つ業界の先駆者であり、OEMカメラの設計、開発、製造を行っています。
私たちは、組み込みビジョンアプリケーションにおけるカメラの要件を認識し、業界のニーズに最適なカメラを提供しています。
また、カメラエンクロージャー、解像度、フレームレート、センサーなどのカスタマイズサービスも提供し、お客様の組み込みビジョンアプリケーションに最適なカメラをお届けします。
e-con Systemsのカメラセレクターページをご覧いただき、豊富なカメラのラインアップをご確認ください。
お問い合わせは、camerasolutions@e-consystems.comまでメールでご連絡ください。

Prabu Kumarは、e-con Systemsの最高技術責任者兼カメラ製品責任者であり、組み込みビジョン分野で15年以上の豊富な経験があります。彼は、USBカメラ、組み込みビジョンカメラ、ビジョンアルゴリズム、FPGAに関する深い知識をも有しています。医療、工業、農業、小売、生体認証などのさまざまなドメインにまたがる50以上のカメラソリューションを構築してきました。また、デバイスドライバー開発とBSP開発の専門家でもあります。現在は、新時代のAIベースのアプリケーションを強化するスマートカメラソリューションの構築に全力を注いでいます。