-Tiefenkamera")


DepthVista_USB_RGBIRD (See3CAM_TOF_25CUG) ist eine Time-of-Flight (ToF) USB-Kamera, die für die präzise 3D-Tiefenmessung entwickelt wurde. Diese ToF-USB-Kamera verfügt über eine Kombination aus einem 3D-Tiefensensor, der Tiefendaten mit einer hohen Auflösung von 640 x 480 @ 30 Bilder/s überträgt, und einem AR0234 Farb-Global-Shutter-Sensor von onsemi®, der Videodaten in HD und FHD @ 30 Bilder/s überträgt.
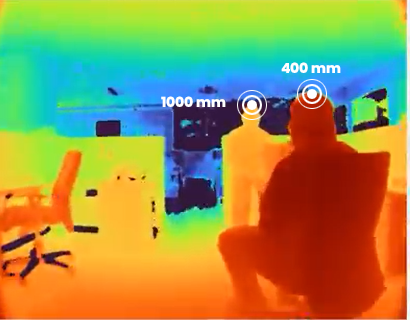
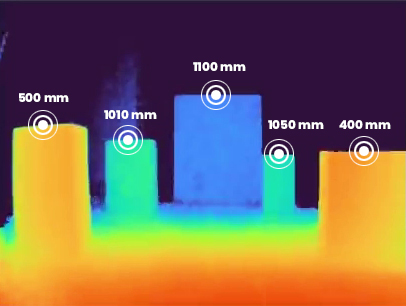
Dies ermöglicht sowohl die Hinderniserkennung als auch die Objekterkennung/-identifikation mit einer Kamera. DepthVista_USB_RGBIRD ist eine 3D Time of Flight USB-Kamera, die sowohl einen Fern- als auch einen Nahbereich von 1,2 m bzw. 6 m hat. Diese 3D-ToF-Kamera verwendet einen VCSEL mit 850 nm, der für das menschliche Auge sicherer ist, und kann auch in absoluter Dunkelheit arbeiten.
Siehe
 Datenblatt für vollständige Details zur Bildrate.
Datenblatt für vollständige Details zur Bildrate.
- Hauptmerkmale:
-
- Bildrate
- RGB-D Mode: Depth(VGA)+IR(VGA)+RGB(VGA) and Depth(VGA)+IR(VGA)+RGB(HD) at 30fps
- TOF Mode: Depth - VGA@30fps, IR - VGA@30fps, Depth+IR - VGA@30fps
- RGB Mode: 2.3MP@30fps and HD@60fps
Datenblatt für vollständige Details zur Bildrate.
- RGB-D 3D-Punktwolke
- RGB-D-Ausgabeformat: Y16
- Enthält 6-achsige IMU
- Enthält zwei dedizierte Temperatursensoren
- Unterstützte Betriebssysteme: Windows 11, Windows10, Ubuntu 18.04, Ubuntu 20.04 and Ubuntu 22.04
- Eindeutige ID für jede Kamera
- Leichtes, vielseitiges und tragbares Design
- Bildrate
- Schnittstelle:
-
- Schnittstelle: USB 3.2 Gen 1 Gerät
- Anschluss: Typ-C-Stecker mit reversibler Schnittstelle
- UVC-Beschwerde - keine zusätzlichen Treiber erforderlich
- Abwärtskompatibel mit USB 2.0-Hosts
- Elektrisch und mechanisch:
-
- Betriebsspannung: USB: 5V & Externe Versorgung: 12V
- Betriebstemperaturbereich: 0°C bis 50°C
- Leistungsbedarf: 12 Watt
- Gröβe in mm (L x B x H): 101,5 mm x 30,8 mm x 34,2 mm
- Gewicht der Karte: 121,5 Gramm
- Sonstiges
-
- Konformität: FCC, RoHS
- Eingeführt am :

- * - Wenn unter Standardbedingungen getestet
- Hinweis - Für die Unterstützung von Android und MAC OS wenden Sie sich bitte an camerasolutions@e-consystems.com
| Tiefenkamera | RGB-Kamera | |
|---|---|---|
| 3D-Technologie | Time-of-Flight (ToF) | - |
| VCSEL-Wellenlänge | 850nm (gepulster Laser) | - |
| Umgebung | Innenbereich | - |
| Betriebsart/Bereich in der Tiefe |
|
- |
| Sensor | CCD-Tiefensensor | AR0234 von onsemi® |
| Fokustyp | Fester Fokus | Fixfokus |
| Auflösung des Sensors | 640 x 480 px | Voll-HD |
| Chroma | - | Farbe |
| Ausgabeformat | Y16 (RAW 12-bit) | Unkomprimiert UYVY |
| Auflösung & Framerate |
|
|
| Pixelgröβe | 5.6 μm x 5.6 μm | 3 μm x 3 μm |
| Aktive Fläche des Sensors | 640(H) x 480(V) | 1920 (H) x 1200 (V) |
| Arraygröβe | 640(H) x 480(V) | 1920 (H) x 1200 (V) |
| Empfindlichkeit | - | 56 Ke-/lux-sec |
| SNR | - | 38 dB |
| Dynamischer Bereich | - | 71.4 dB |
| Halterung | M12 (S-Mount) | M12 (S-Mount) |
| FOV | 84.29° (H) x 64.14° (V) x 99.75°(D) (mit dem von e-con gelieferten Objektiv) | 80.61° (H) x 55.69° (V) x 90.09°(D) (mit dem von e-con gelieferten Objektiv) |
- Unterstützte Betriebssysteme - Windows 11, Windows10, Ubuntu 18.04, Ubuntu 20.04 and Ubuntu 22.04
- Beispielanwendung:
-
- DepthVista - Windows- und Linux-Anwendung für die Videovorschau mit SDK-Paketen
- Entwicklungsumgebung:
-
- C++ Qt Anwendung
- Standbilderfassung:
-
- Software-Anwendungssteuerung
- UVC-Steuerungen:
-
- RGB-Kamera
- Helligkeit
- Bildschärfe
- Kontrast
- Gamma
- Farbsättigung
- Weiβabgleich
- Verstärkung
- Belichtung
- Netzfrequenz
- RGB-Kamera
- Zusätzliche Steuerelemente:
-
- RGB-Kamera
- Spezieller Effekt
- ROI-basierte Belichtung
- Belichtungskompensation
- Steuerung der Framerate
- Gesichts- und Lächelerkennung
- Rauschunterdrückung
- H-Spiegelung
- V-Spiegelung
- RGB-Kamera
- Hinweis - Für die Unterstützung von Android und MAC OS, kontaktieren Sie bitte camerasolutions@e-consystems.com









DepthVista - Anpassung
- Tiefenabstimmung nach Vorgaben
- Formfaktor
- Optik-/Objektivwechsel
- Sensorwechsel
- Benutzerdefinierte Anpassung von Firmware und Hardware nach Kundenwunsch ist möglich. Bitte kontaktieren Sie uns für Anpassungen und zusätzliche Funktionen