depth camera")


DepthVista_USB_RGBIRD(See3CAM_TOF_25CUG)는 정밀한 3D 깊이 측정을 위해 설계된 ToF(Time of Flight) USB 카메라입니다. 이 ToF USB 카메라에는 640 x 480 @ 30fps의 고해상도로 심도 데이터를 스트리밍하는 3D 심도 센서와 HD 및 FHD @30fps의 비디오 데이터를 스트리밍하는 onsemi®의 AR0234 컬러 글로벌 셔터 센서가 결합되어 제공됩니다.
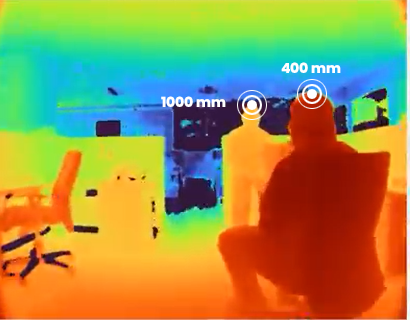
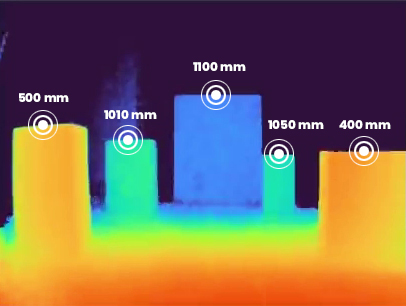
이를 통해 하나의 카메라로 장애물 감지와 물체 인식/식별이 모두 가능해집니다. DepthVista_USB_RGBIRD는 각각 1.2m와 6m의 원거리 및 근거리 모드를 모두 갖춘 3D 비행 시간 USB 카메라입니다. 또한 이 3D ToF 카메라는 사람의 눈에 더욱 안전하도록 850nm의 VCSEL을 사용하며 절대 암흑 속에서도 작동할 수 있습니다.
전체 프레임 속도 세부정보는
 데이터시트를 참조하세요 .
데이터시트를 참조하세요 .
- 주요 특징들:
-
- 프레임 속도
- RGB-D 모드: 깊이(VGA)+IR(VGA)+RGB(VGA) 및 깊이(VGA)+IR(VGA)+RGB(HD)(30fps)
- TOF 모드: 깊이 - VGA@30fps, IR - VGA@30fps, 깊이+IR - VGA@30fps
- RGB 모드: 2.3MP@30fps 및 HD@60fps
데이터시트를 참조하세요 .
- RGB-D 3D 포인트 클라우드
- RGB-D 출력 형식: Y16
- 6축 IMU 하우징
- 전용 온도 센서 2개 내장
- 지원되는 OS: Windows 11, Windows10, Ubuntu 18.04, Ubuntu 20.04 및 Ubuntu 22.04
- 각 카메라의 고유 ID
- 가볍고 다재다능하며 휴대성이 뛰어난 디자인
- 프레임 속도
- 상호 작용:
-
- 인터페이스: USB 3.2 Gen 1 장치
- 커넥터: Type-C 가역 인터페이스 커넥터
- UVC 규격 - 추가 드라이버가 필요하지 않습니다
- USB 2.0 호스트와 역호환 가능
- 전기 및 기계:
-
- 작동 전압: USB: 5V 및 외부 공급: 12V
- 작동 온도 범위: 0°C ~ 50°C
- 전력 요구사항: 12와트
- 크기(mm)(lxbxh): 101.5 mm x 30.8 mm x 34.2 mm
- 보드 무게: 121.5그램
- 여러 가지 잡다한
-
- 규정 준수: FCC, RoHS
- 출시 날짜 :

- * - 표준 조건에서 테스트한 경우
- 참고 - Android, MAC OS 지원의 경우 camerasolutions@e-consystems.com 으로 문의하세요.
| 깊이 카메라 | RGB 카메라 | |
|---|---|---|
| 3D 기술 | 비행시간(ToF) | - |
| VCSEL 파장 | 850nm (펄스 레이저) | - |
| 환경 | 실내 | - |
| 깊이 작동 모드/범위 |
|
- |
| 센서 | CCD 깊이 센서 | AR0234 from onsemi® |
| 초점 유형 | 고정 초점 | 고정 초점 |
| 센서 해상도 | 640 x 480 px | 풀 HD |
| 크로마 | - | 컬러 |
| 출력 형식 | Y16 (RAW 12-bit) | 압축되지 않은 UYVY |
| 해상도 및 프레임 속도 |
|
|
| 픽셀 크기 | 5.6 μm x 5.6 μm | 3 μm x 3 μm |
| 센서 활성 영역 | 640(H) x 480(V) | 1920 (H) x 1200 (V) |
| 배열 크기 | 640(H) x 480(V) | 1920 (H) x 1200 (V) |
| 반응성 | - | 56 Ke-/lux-sec |
| SNR | - | 38 dB |
| 다이내믹 레인지 | - | 71.4 dB |
| 홀더 | M12 (S-마운트) | M12 (S-마운트) |
| FOV | 84.29° (H) x 64.14° (V) x 99.75°(D) (e-con 제공 렌즈 포함) | 80.61° (H) x 55.69° (V) x 90.09°(D) (e-con 제공 렌즈 포함) |
- 지원되는 OS - Windows 11, Windows10, Ubuntu 18.04, Ubuntu 20.04 및 Ubuntu 22.04
- 샘플 애플리케이션:
-
- DepthVista - SDK 패키지를 사용한 비디오 미리보기용 Windows 및 Linux 애플리케이션
- 개발 환경:
-
- C++ Qt 애플리케이션
- 스틸 캡처:
-
- 소프트웨어 애플리케이션 제어
- UVC 컨트롤:
-
- RGB 카메라
- 명도
- 날카로움
- 차이
- 감마
- 포화
- 화이트 밸런스
- 얻다
- 노출
- 전력선 주파수
- RGB 카메라
- 추가 제어:
-
- RGB 카메라
- 특수 효과
- ROI 기반 노출
- 노출 보정
- 프레임 속도 제어
- 얼굴 및 미소 감지
- 노이즈 제거
- H 플립
- V 플립
- RGB 카메라
- 참고 - Android 및 MAC OS 지원에 대해서는 camerasolutions@e-consystems.com 으로 문의하세요.
DepthVista SDK 기능:
- DepthVista GUI 애플리케이션
- Qt로 구동되는 DepthVista GUI 애플리케이션을 사용하면 다음을 수행할 수 있습니다:
-
- 깊이 프레임, IR 프레임 및 컬러 프레임의 2D 표현을 미리 봅니다.
- 깊이 프레임 및 색상화된 깊이 프레임의 3D 표현을 미리 봅니다.
- 데이터 모드와 깊이 범위 사이를 원활하게 전환하여 경험을 맞춤화하세요..
- 지원되는 데이터 모드
- 깊이 + IR
- 깊이
- IR
- 깊이 + IR + RGB(VGA)
- 깊이 + IR + RGB(HD)
- RGB VGA
- RGB HD
- RGB 풀 HD
- RGB 1200p
- 깊이 범위
- 근거리 범위(0.2~1.2m)
- 원거리(1~6m)
- 시각적 출력을 향상시키는 후처리 필터
- 평탄화
- 왜곡되지 않음
- 일시적인
- 공간
- 가장자리
- 2D 및 3D 프레임 모두에 대해 정지 이미지를 캡처합니다(3D 프레임은 .ply 파일로 저장됨).
- 컬러 카메라용 UVC 컨트롤을 활용하고 일반 장치 정보에 액세스합니다.
- 콘솔 애플리케이션(C++ 및 Python)
- C++와 Python 모두에서 사용할 수 있는 포함된 샘플 콘솔 애플리케이션을 통해 다음을 수행할 수 있습니다:
-
- 이 애플리케이션의 소스 코드는 지원되는 모든 OS에 대한 빌드 단계와 함께 제공됩니다.
- DepthVista 장치에서 데이터 액세스, 열기 및 스트리밍에 대한 통찰력을 얻으세요.
Depthvista SDK의 블록 다이어그램:

 SDK를 배포하는 방법")

 카메라는 어떻게 원격 환자 모니터링을 더욱 안전하고 비공개적으로 만들까요?")
 카메라에서 이를 최소화하는 방법은 무엇입니까?")



가 다른 3D 깊이 매핑 기술과 비교되는 방식")

DepthVista - 사용자 정의
- 사양에 따른 깊이 튜닝
- 폼 팩터
- 광학/렌즈교체
- 센서변화
- 고객 요구 사항에 따라 펌웨어 및 하드웨어를 맞춤 설정할 수 있습니다. 사용자 정의 및 추가 기능에 대해서는 당사에 문의하십시오.